ロボットビジョン
ロボットビジョンとは
さまざまな形状の物体認識を実現
ロボットビジョンとは箱や袋、様々な形状の物体認識を意味します。
物流業界で大きなニーズのある当社が開発したAI箱デパレシステムはロボットによりパレットやかご車から箱の荷卸しを行うシステムで、ランダムワークに対応しています。例えばPPバンドテープ付、PPバンドテープなし、黒テープ、透明テープなど、ほぼ全ての箱の認識が可能です。
また、当社が開発したAI袋デパレシステムは、ロボットによりパレット上に積まれた袋などの荷卸しを行うシステムです。重なり合う薄く不安定な袋や絵柄もない無地の袋などの認識が可能です。

ロボットビジョンの判別方法
AI箱デパレシステムについて
一般的に、パレットやかご車内の箱認識は通常絵柄などを事前登録して、登録情報に基づき箱の認識を行う2次元の古典アルゴリズムを使用する場合が多いですが、当社では箱(矩形)におけるほぼ全てのワークを絵柄などの事前登録マスターを使用せず、認識することが可能です。箱サイズ情報のみを使用して、カメラで取得した3次元及び2次元の箱の形状から数学的手法と画像を認識を組合せて、箱の個々の認識を行います。
AI袋デパレシステムについて
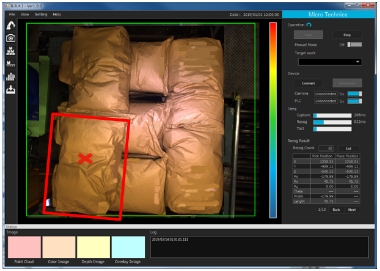
DeepLearning機能により、袋の重なりを学習させます。学習に必要な画像は30~60枚ほどです。学習で得られるAI model(判定アルゴリズム)と通常の3次元認識に実装し、より高精度な画像認識を実現します。袋の中でも絵柄もなく無地に近い状態の材質でも判定率は99%以上を維持することができます。3DとAI(ディープラーニング)による2Dの画像処理を組み合わせ、従来難しかった難易度の高い袋ワークにも対応可能です。
ロボットビジョンのメリット
AI箱デパレシステムについて
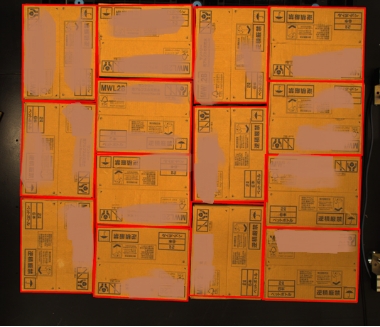
下記のような様々な条件の箱が混載していても認識が可能です。
01.
大きさの違う箱
02.
封をするテープの
色が様々な箱
(透明テープ含む)
03.
表面の印刷が様々な箱
04.
PPバンドが
巻かれている箱
05.
PPハンドが巻かれており
テープが貼っていない箱
AI袋デパレシステムについて
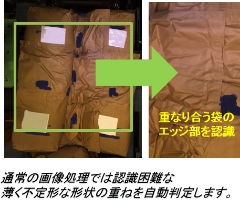
充填率が低く薄い袋が複雑に重なり合っている場合、従来は3Dでも2Dでも認識は困難でした。本システムにより通常の3Dと2Dの画像認識にAI(ディープラーニング)による認識を加えることで、重なり合った袋の上下関係の判別が可能となりました。この新しい画像処理技術により、袋をパレットに積み込む際のミスや積上げ手順の不徹底など、積み付け条件の悪いパレットに対してもロボットによるデパレタイズ自動化が可能です。
ロボットビジョンの手順
AI箱デパレシステム 仕様概要
箱デパレは主にパレットやかご車からのロボットで荷卸しを行うシステムです。当社のビジョンシステムでは、最上面の個々の箱の3次元の位置を認識してピッキングポイントをロボットコントローラやPLCなどに送信します。ピッキングポイントの座標系は、カメラ座標をロボット座標に変換して送信するのが一般的ですが、ユーザー座標系(ワールド座標)でも送信可能です。またロボットハンドの形状にあわせて、かご車やパレット・他に箱などにハンドが衝突しないように、ハンドの干渉チェックを行った上で有効なピッキングを送信します。
| 視野範囲 | 1200x1200mm (カメラを複数台使用して視野範囲を広げることも可能です。1600㎜まで実績有) |
| 奥行き (積載物MAX高さ) |
2000mm (最大2300m ワーク最小サイズにより調整可) |
| 認識対象物 | 箱、その他矩形に類似する製品 |
| 3Dビジョン | 3Dカメラ *3Dカメラは視野範囲や設置条件により 複数の機種の選択可 |
| 2Dビジョン | カラーカメラ(解像度5MP) *特注照明により小型照明を使用 |
| PC | OS Windows10, CPU Corei7以上(GPU付き推奨) *ご支給の場合有 |
| 電源 | PC・照明用電源・PoEハブ カメラ電源(固定カメラの場合) 入力:AC100-240V 50/60Hz *ハンドアイ用3Dカメラ及び2DカメラはGigE PoE対応 |
| 外形寸法 (TBD) |
固定カメラは照明と一体型ユニット:特注ENSENSO X36 ハンドアイカメラ:ENSENSO N35を使用 |
| 設置面積 | 制御盤など寸法は別途打合せによる |
| 接続ロボット | 安川電機・ファナック・川崎重工・オークラ他 *PLC経由での接続可 |
| 認識ソフトウェア | 同一ワーク:数理最適化アルゴリズム ランダムワーク:2D+3D+DeepLearning その他認識:残物確認、パレット有無、かご車枠認識など |
| ハンド干渉チェック機能 | ピック&プレース ロボットハンド干渉チャック機能有 |
| キャリブレーション機能 | ロボットキャリブレーション ハンドアイキャリブレーション(オプション) |
| 品種登録 | 品種登録機能有 |
| パターンマッチング機能 | テンプレートマッチング機能有り(オプション) *通常のデパレでは不要 |
| 処理時間 (撮像から認識まで) |
1.5sec~3sec (但し、使用する認識アルゴリズムによる) |
AI袋デパレシステムについて 仕様概要
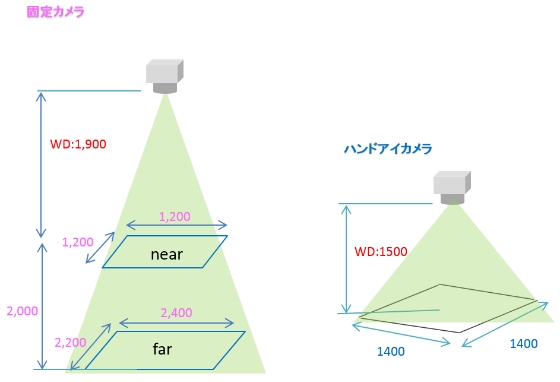
| 視野範囲(参考) *視野範囲はカメラの レンズやカメラ台数に より変更可能です。 |
 |
||||||||||||
| ビジョンユニット選択 | 固定カメラ又はハンドアイカメラの選択 | ||||||||||||
| ビジョンユニット構成 | 3Dカメラ・2Dカメラ・LED照明・コントロールボックス・PC | ||||||||||||
| 固定カメラ |
|
||||||||||||
| ハンドアイカメラ |
|
||||||||||||
| PC | OS:Win10, CPU:Corei7以上, メモリ:16GB以上, GPU付き推奨 | ||||||||||||
| ロボット キャリブレーション |
機能有り | ||||||||||||
| ロボット接続 | PLC(オムロン・三菱)経由での接続 *ロボットコントローラへの接続も可能。 詳細はお問い合わせください。 |
||||||||||||
| 品種ID | 品種ID設定機能有り | ||||||||||||
| 干渉チェック | ロボットハンド干渉チェック機能有り | ||||||||||||
| 動作環境 |
|
||||||||||||
| 備考 | 仕様は予告なく変更される場合があります。 |